Scientists Create Cyborg Cockroach Camera for Search and Rescue
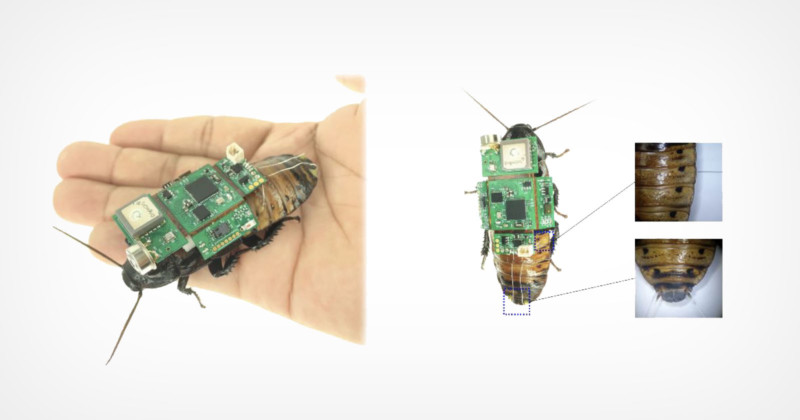
A group of international robotics researchers has developed an urban search and rescue solution that skirts past the current limitations of miniature robotics through what they are calling an insect computer hybrid system, which fuses a living insect platform with a microcontroller.
The combination cyborg cockroach is capable of autonomous navigation with the ability to find and detect humans in damaged environments such as a collapsed buildings. It uses a mix of a custom control algorithm and the insect’s natural navigation capability to be able to explore complex terrains, and its onboard “human presence detection” uses an infrared camera that is guided by a custom machine learning model.
Because of its hybrid design, the cyborg cockroach has a much longer “battery” life than conventional robotics of similarly small size and can operate for an hour (or more) which makes it actually viable for real-world missions.
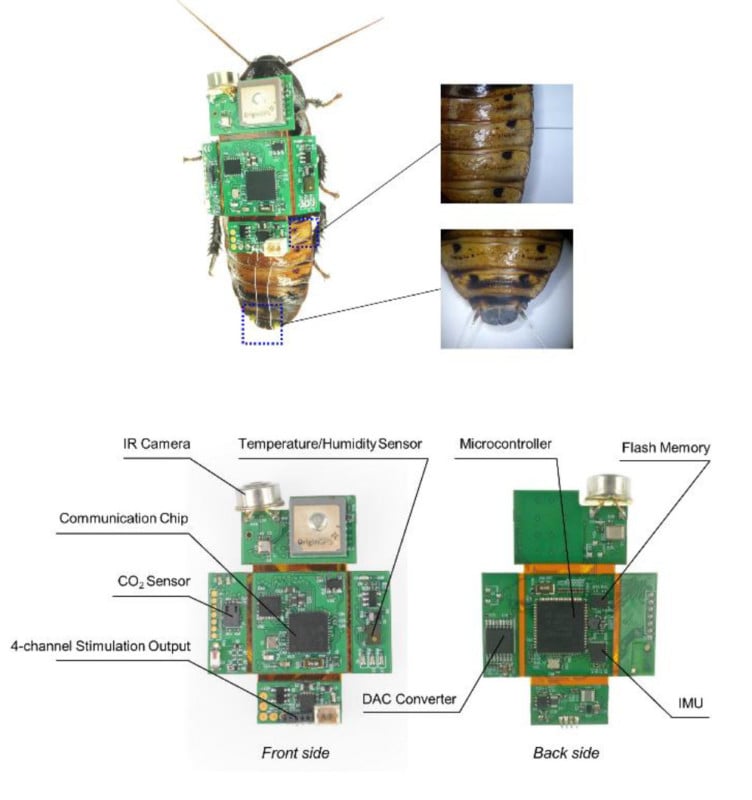
In their 43-page paper, the researchers explain that the cockroach is mainly controlled via electrical stimulus at neural, neuromuscular, or sensory locations. Because the insect provides most of the “power” through its biology, the amount of electrical power that needs to be built into the computing array is minimal.
“The insect–computer hybrid system consists of an insect platform manipulated by a customized wireless backpack control system,” the researchers explain. “The insect’s movement was directed by electrically stimulating its left and right cerci to induce turning; when the left cercus was stimulated, the insect made a right turn (clockwise rotation), and vice versa.”
The video below was uploaded by a research team in 2015 and shows how they were able to control the direction of a beetle through electrical impulses, the same method by which the cockroach is controlled.
Below is a video from the research project that shows how the system works specifically with a cockroach.
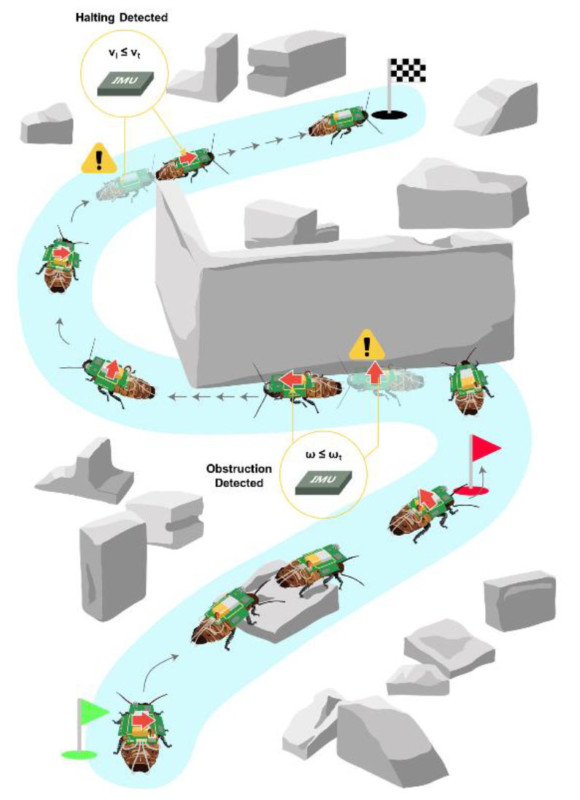
The team tested the cyborg cockroach’s ability to navigate the terrain and find humans by placing it in a mock situation with the inclusion of several human and non-human targets. The researchers say that despite the lack of any obstacle information beforehand, the cyborg was able to successfully guide itself through the terrain and using the infrared camera and human-detection algorithm was able to correctly classify humans while ignoring non-human subjects (as shown below).
The onboard infrared camera is a small 32×32 pixel sensor with a 90-degree field of view and the researchers state that its system has an 87 percent success rate at distinguishing humans from other subjects, which improves to 90 percent when the cockroach is within one and a half meters from the subject. While the cockroach cannot be tracked in real-time due to hardware constraints, the researchers hope to implement this in the future with low-energy signals that can be relayed to the control center.
The full research paper can be found here.
Image credits: All photos, illustrations, and videos via arXiv:2105.10869.



