KineCAM: A DIY Instant Camera That Creates Animated Photos
The KineCAM is an instant camera-inspired “DIY” device that allows users to capture and create “animated” photographs (of physical GIFs) in the form of a kinegram.

“Digital photography has experienced a surge in popularity, and advancements in camera technology have spurred exponential growth in the number of photos captured,” the team writes. “Digital photographs are easy to manipulate, reproduce, and share—features that are valued in our increasingly connected world.
“While digital and smartphone cameras have become increasingly powerful photography tools, instant cameras, such as Polaroids, have kept their nostalgic appeal. Although instant cameras are more limited in their use and image quality than digital cameras, surprisingly there is growing interest in instant photography as new-old cameras enter the market.”
The kinegram is an animation technique that has been around since before the 1900s, appearing in countless books, playing cards, and even tattoos. While these image types don’t offer the best resolution or frame rates, they do come with unique affordances. The team says that kinegrams require viewers to physically engage with the printed images in order to “activate” them, giving the viewer control over the speed and direction of motion, and providing a more intimate and hands-on experience that is absent from standard digital photos.”
The KineCAM was built to bridge the gap by merging live capture and fabrication into a single portable device.


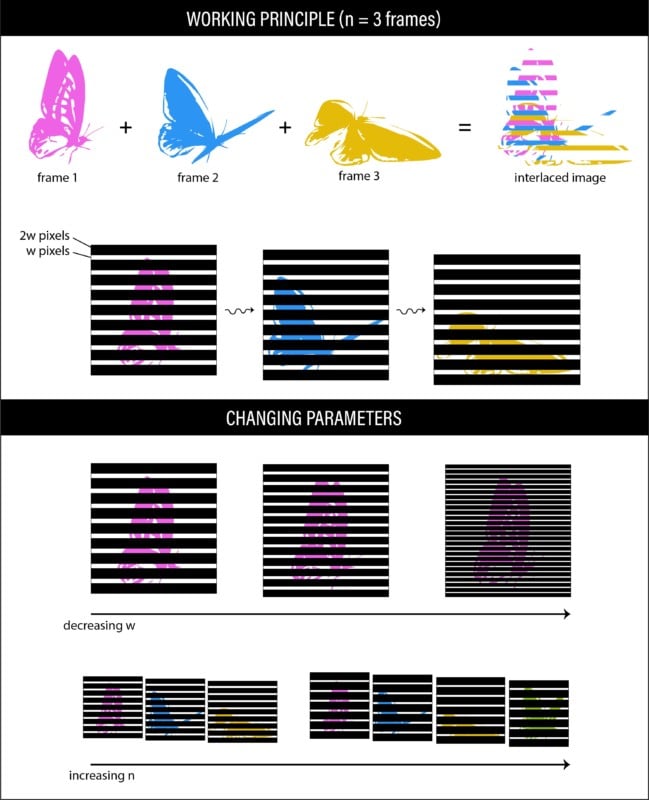
Kinegrams are created using a “barrier-grid” animation that effectively exploits the principles of moiré to show different images depending on how the overlaid grid is aligned. The “total” image is actually several images with segments of each arranged in rows that the lines of the grid cover up and reveal as you move it and your brain simply “fills in the gaps” as you move the grid to another position.


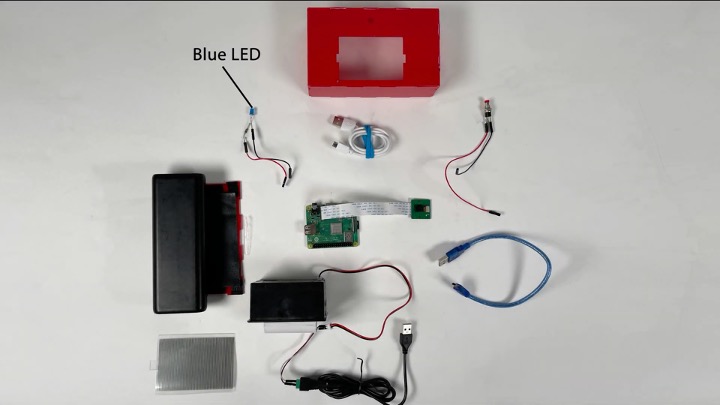
The MIT team has released the code for the device along with details on the components needed to build the camera itself, all of which cost a little under $100 (not including the Raspberry Pi) making it a pretty fun project or gift for the photographers on your list. More information about the KineCAM can be found on the official project page and paper here.